


如何利用GNSS衛星定位測量空間坐標位置

利用全球導航衛星系統(GNSS)進行空間坐標位置測量,主要基于后方交會原理,通過接收和解析來自多個衛星的信號來確定用戶設備的位置。以下是使用GNSS進行定位測量的基本步驟:
1. 衛星信號接收:GNSS系統(如GPS、GLONASS、Galileo、BeiDou等)由分布在不同軌道上的衛星組成。用戶設備(如智能手機、車載導航、GPS接收器等)接收來自這些衛星的無線電波信號。
2. 信號時間差計算:接收器記錄信號從衛星到達接收器的時間差(TOA)。由于光速極快,這一時間差可以用來計算出從衛星到接收器的距離。

3. 距離計算:利用信號傳播速度(光速)和接收到的信號時間差,計算出接收器與衛星之間的距離。這個距離是衛星到接收器的球面距離。
4. 三維位置解算:至少需要四顆衛星的信號來確定接收器的三維位置(經度、緯度、高度)。通過解算這四個距離與衛星位置的關系,即可得出接收器的空間坐標位置。
5. 誤差修正:在實際測量中,會受到多種因素的影響,如大氣折射、多路徑效應、衛星鐘差、接收機鐘差、用戶天線相位中心偏差等。現代GNSS系統通常會提供差分定位服務來修正這些誤差,提高定位精度。
6. 差分定位:差分定位是通過比較基準站(高精度參考站)與用戶接收機之間的信號傳播時間差來進一步提高定位精度。基準站的信號被廣泛廣播,用戶接收機則計算自身與基準站之間的距離差,從而修正自身的定位誤差。

7. 實時動態定位(RTK):實時動態定位是差分定位的一種應用,它使用實時傳輸的差分改正信息,可以提供厘米級甚至亞厘米級的定位精度。
8. 數據處理:接收器收集的數據經過算法處理,包括信號解碼、距離計算、位置解算、誤差修正等步驟,最終得到精確的位置坐標。
通過以上步驟,GNSS系統可以實現對地面、水面、空中以及海底等各類位置的高精度定位,廣泛應用于導航、測繪、地質勘探、氣象監測、交通運輸等多個領域。
南京環球測繪儀器有限公司提供GNSS/RTK/GPS、千尋知寸CORS賬號、全站儀、水準儀、經緯儀、垂準儀、無人機等測繪儀器的銷售、租賃、檢定、校正、維修等服務,也承接測繪培訓與各種內外業工程測量任務,有相關的需要了解都可以留言或者在線咨詢我們,我們將詳細為你解答。
更多相關

全站儀道路放樣功能使用指南,看完快速了解
全站儀的道路放樣功能是現代道路工程中實現高精度施工定位的關鍵技術。以下為詳細操作指南,幫助測量人員高效、準確地完成道路放樣任務。一、準備工作儀器檢校:確保全站儀...

全站儀后方交會原理及應用詳解
全站儀后方交會是測量工程中的一種經典定位方法,指在待定點上設站,通過觀測至少兩個已知控制點的方向和距離,從而計算出測站點坐標的測量技術。與需要已知點設站的前方交會不同,后方交會的核心優勢在于測站可以自...
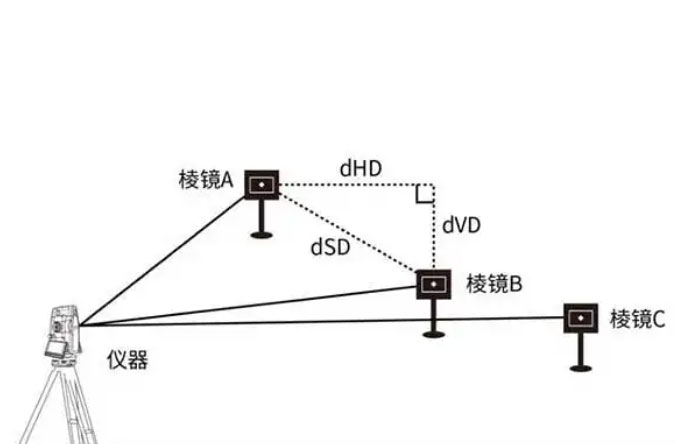
全站儀的dHD、dHA、dHR、dSD、dVD分別代表什么含義?
全站儀是一種集電子測距、電子測角和數據處理于一體的高精度測量儀器,廣泛應用于工程測量、地形測繪、建筑施工等領域。在全站儀的測量結果或顯示界面中,我們常會看到諸...

全站儀免棱鏡模式在高空鋼結構測量中的應用與優勢
在現代大型工業廠房、體育場館、交通樞紐等建設中,高空鋼結構以其跨度大、強度高、施工速度快等優點被廣泛應用。然而,高空鋼結構的安裝、定位與校正測量工作,一直是施...

天寶DINI03電子水準儀使用指南及常見問題匯總
天寶DINI03是一款高精度的電子水準儀,廣泛應用于國家一等、二等水準測量及各類精密工程測量。其操作簡便、精度可靠,是測量工程師的得力測繪儀器工具。一、使用...

全站儀精度等級劃分,看完你就懂了
全站儀作為現代工程測量的核心儀器,其精度是衡量儀器性能和價值的關鍵指標。精度等級的科學劃分,不僅為用戶選型提供了明確依據,也反映了儀器在設計、制造與集成技術上的...
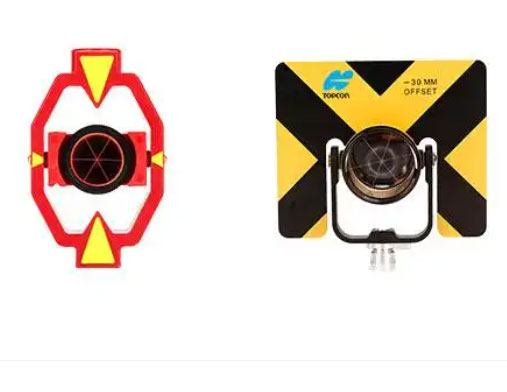
全站儀棱鏡的使用方法,以及使用注意事項
全站儀棱鏡是配合全站儀進行距離和角度測量的重要附件,主要用于反射全站儀發射的紅外或激光信號,從而實現高精度測距。正確使用棱鏡不僅關系到測量數據的準確性,也直接...

垂準儀介紹與激光垂準儀使用方法詳解
在建筑工程、土木施工、設備安裝及室內裝修等領域,精確的垂直基準傳遞是確保施工質量的關鍵。垂準儀,正是專門用于進行鉛垂線基準傳遞的精密光...
 環球測繪微信
環球測繪微信